Что такое «двойной сервопривод»
При осуществлении стабилизации раскачивающейся камеры сервопривод должен часто менять направление вращения. В результате работы сервомеханизма камера испытывает толчки небольшой амплитуды. Даже если удается устранить дрожание кадра посредством цифровой обработки видеоматериала, то четкость изображения все равно ухудшается, особенно при съемке с недостаточным освещением и удлиненной выдержкой кадра. Амплитуда нежелательных колебаний связана со следующими причинами: сумма люфтов в редукторе сервопривода, сумма люфтов в соединениях опоры, недостаточная жесткость конструкции, задержка реакции сервомеханизма на сигнал датчиков положения. Еще одни часто проявляющийся недостаток – раскачивание камеры, усиливаемое сервомеханизмом. Так как видеокамера обладает значительной массой, то за счет инерции она не останавливается в заданной точке после вращения. Сервомеханизм начинает возвращать камеру к заданной позиции, что в результате и приводит к усиливаемому раскачиванию.
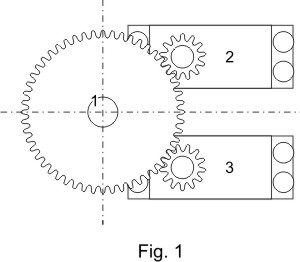
Цель изобретения – снизить нежелательные колебания видеокамеры при использовании сервопривода. Задача решается тем, что на каждую ось вращения устанавливается по два сервопривода. При вращении камеры сервоприводы действуют синхронно, но в нейтральном положении создают небольшую нагрузку в противоположных направлениях. В результате компенсируются люфты в трансмиссии, предотвращаются толчки при изменении направления вращения. Так же сокращается задержка реакции на сигнал управления.